ROS 에서 message filter 의 기능은 서로 다른 주파수로 발행되는 각 토픽들의 Sync 를 맞추는 것입니다.
저의 경우, /image_raw, /camera_info, /scan , /darknet_ros/bounding_boxes 의 4개의 토픽을 받아서 필터로 들어오도록 하고 있습니다.
하지만, /darknet_ros/bounding_boxes 를 filter 의 인수로 추가하기만 하면 메시지 필터 콜백 함수가 불러와지지 않았습니다.
/image_raw, /camera_info, /scan 만으로는 문제없이 작동하는 메시지 필터가 **/bounding_box 에 대해서만** 작동하지 않았습니다.
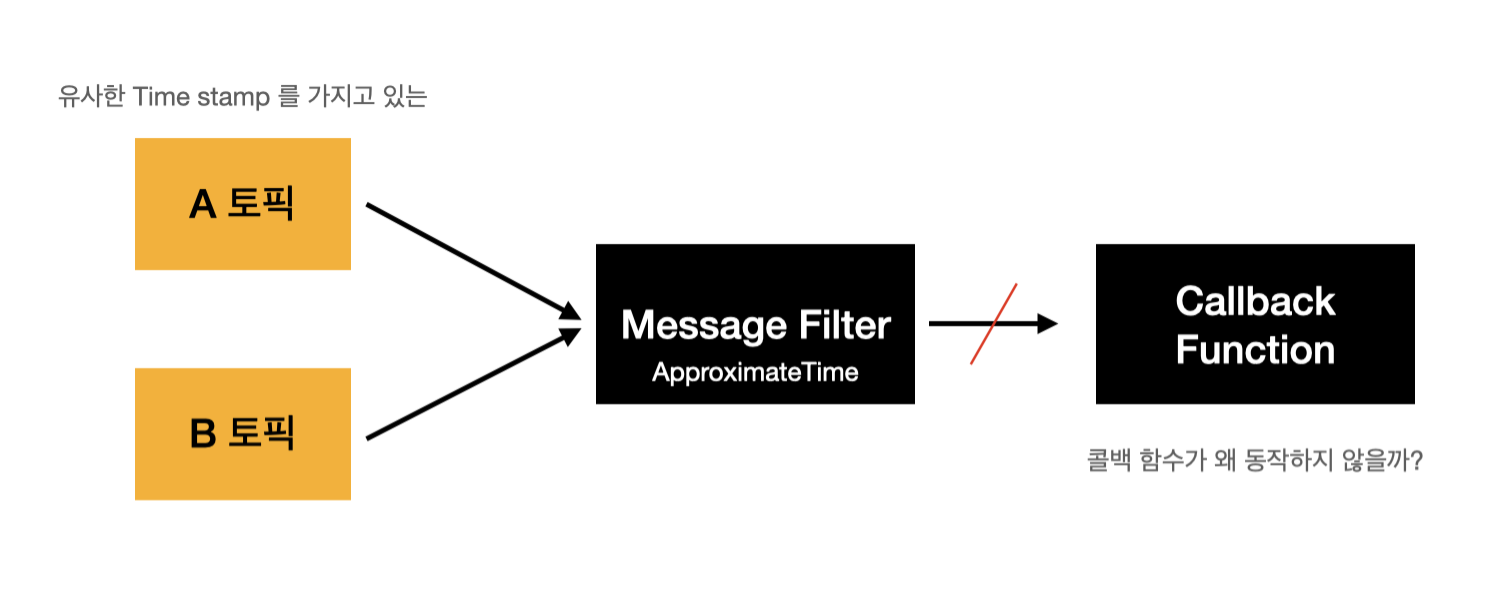
메시지 필터는 header 의 time stamp 값을 기준으로 토픽을 통과시킵니다
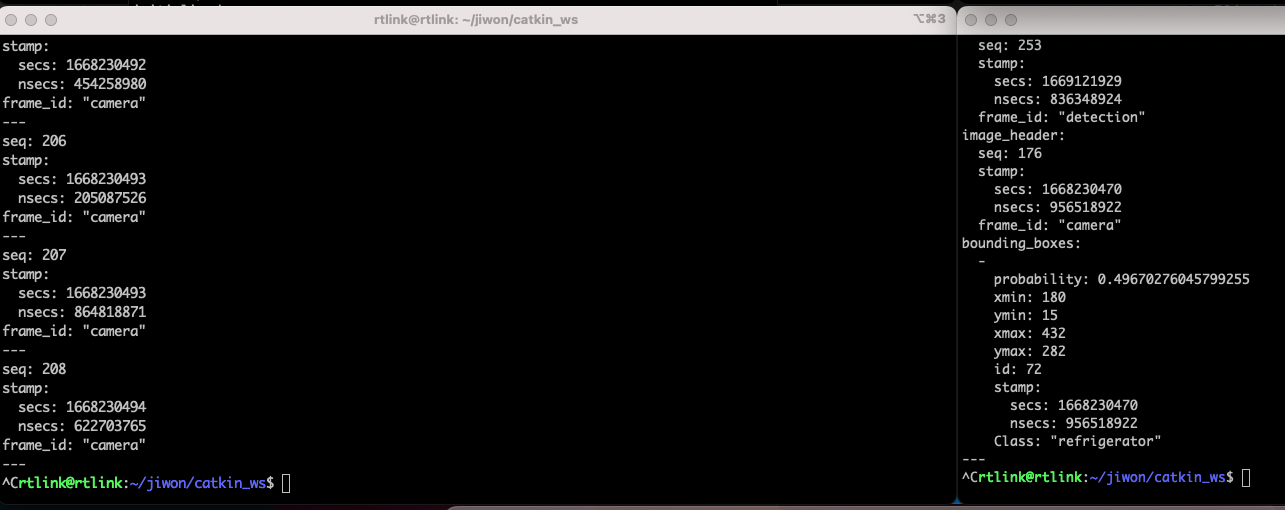
따라서 time stamp 를 확인할 필요가 있습니다.
rostopic_info 로 두 가지 토픽 (bounding_box, image) 을 rostopic info 로 자세히 확인해 보면 다음과 같은 정보가 출력됩니다.
```python
//bounding_box
---
header:
seq: 174
stamp:
secs: 1669093345
nsecs: 623516547
frame_id: "detection"
image_header:
seq: 92
stamp:
secs: 1668230406
nsecs: 708906199
frame_id: "camera"
bounding_boxes:
-
probability: 0.3576541244983673
xmin: 219
ymin: 12
xmax: 508
ymax: 300
id: 72
Class: "refrigerator"
---
```
```python
//image
---
header:
seq: 3815
stamp:
secs: 1668230396
nsecs: 590875035
frame_id: "camera"
height: 480
width: 640
distortion_model: ''
D: []
K: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
R: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
P: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
binning_x: 0
binning_y: 0
roi:
x_offset: 0
y_offset: 0
height: 0
width: 0
do_rectify: False
---
```
header/stamp 를 보면 두 토픽의 시간 스탬프가 서로 조금 다른 것을 볼 수 있습니다.
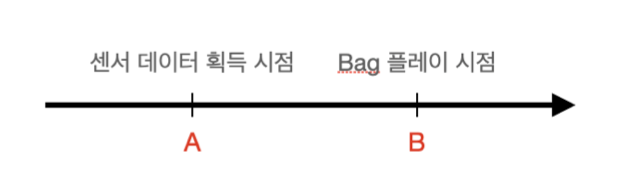
이와 같이 로봇 프로젝트의 경우 센서 데이터 획득 시점과 bag 파일 재생 시점이 달라서 여러 문제들이 생기곤 합니다.
구글에 찾아보면 이와 같은 문제에 대해서는 크게 두 가지의 해법이 제공됩니다.
1. MySyncPolicy 에 들어가는 변수값을 조정하거나,
2. waitForTransform 에 들어가는 ros::Time(0) 을 ros::Time(now) 로 변경하거나,
등의 해결 방법을 볼 수 있습니다. (1) 방법은 ApproximateTime 필터의 기준을 완화시켜주고 (2) 방법은 시뮬레이션 타임과 bag record 타임의 시간 차이를 해결해 줄 수 있습니다.
## 해결 방법
/bounding_box 가 다른 토픽들과 다른 점은, 나머지 세 토픽은 터틀봇에서 데이터셋을 수집할 때 받아온 토픽이지만
이것만은 **darknet_ros 에서 현재 시점으로 발행**하고 있다는 점이었습니다
darknet_ros 의 메인 코드인 YoloObjectDetector.cpp 코드를 다음과 같이 수정했습니다.

이렇게 되면, /image_raw 의 time stamp 와 동일하게 bounding box 가 발행됩니다.
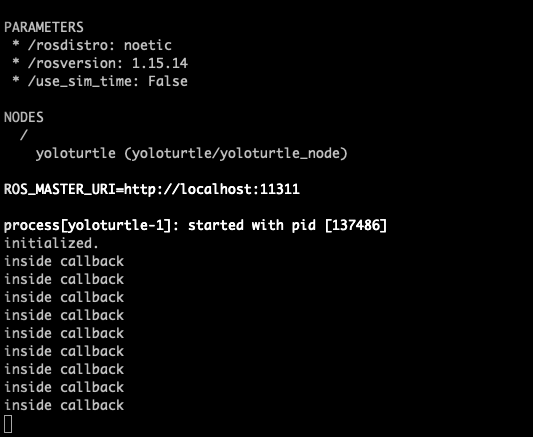
다음과 같이 정상적으로 콜백 함수를 호출하는 것을 볼 수 있습니다.