ROS & Robotics
URDF to MJCF : mujoco-py
- -
mujoco 는 물리엔진을 지원하는 시뮬레이터로, MJCF 파일 (확장자 : xml) 을 통해서 모델을 환경으로 불러옵니다.
그런데 여기서 문제는 대부분의 로봇 description file 은 URDF 혹은 xacro (xml) 로 되어 있다는 것입니다.
게다가 직접 fusion360 등으로 로봇을 설계할 경우에, 이를 fusion2urdf 패키지 등으로 export 한 경우에 또 URDF 파일을 손에 쥐게 되는 경우가 있죠...
그래서 이 URDF 파일을 MJCF 파일로 바꿔 줘야 하는데, 간단한 방법을 몰라서 삽질을 했습니다.
그 방법은 다음과 같습니다.
우선 터미널에서 mujoco.viewer 를 실행시켜 줍니다.
python3 -m mujoco.viewer
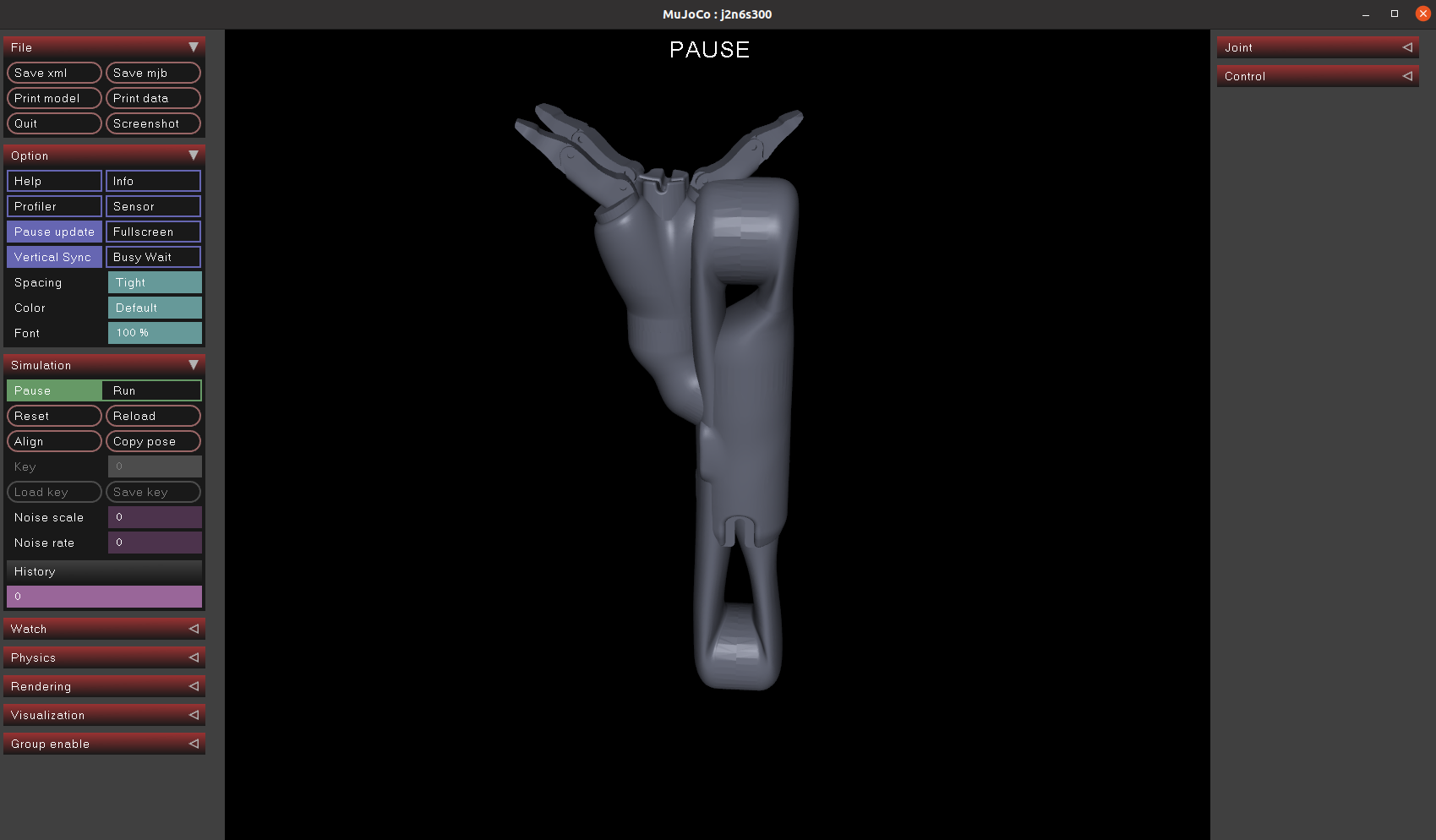
그리고 URDF 를 떨어뜨리면 다음과 같이 모델이 불러와지는데, 여기 좌상단에 "Save xml" 을 누르면 MJCF 파일이 저장됩니다...
매우 간단 ..
'ROS & Robotics' 카테고리의 다른 글
| ROS message filter: waitForTransform() Lookup error (0) | 2024.02.04 |
|---|---|
| ROS Message Filter : Approximate Time Callback error (1) | 2024.02.04 |
| MuJoCo-python 환경에서 body 에 외력 주기 (xfrc_applied) (0) | 2024.01.10 |
| Gazebo 에서 IMU 데이터 받아와서 csv 파일로 저장하고 데이터 시각화하기 (0) | 2023.09.17 |
| [RELLIS-3D] Gazebo Warthog 로봇에 IMU 탑재하기 (0) | 2023.07.05 |
Contents
소중한 공감 감사합니다