장비 사용 설명서
YDLiDAR 을 ROS 에서 사용하기
- -
YDLidar ROS
세팅은 링크 참고하기
튜토리얼
- catkin_ws/src 폴더 내에 깃 레포지토리를 복사한다.
$ git clone https://github.com/YDLIDAR/ydlidar_ros - catkin_make 를 실행한다.
- 라이다 모델명에 맞는 launch 파일을 수정한다.
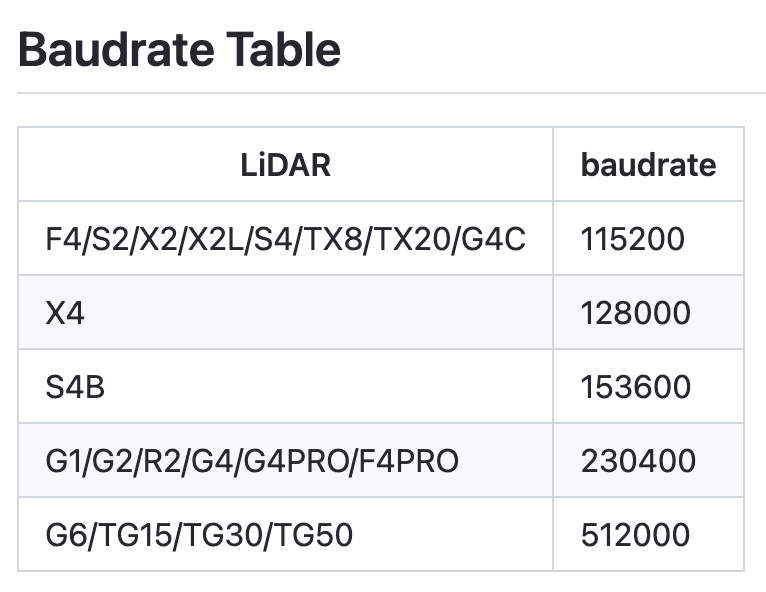
다음 표를 참고해서 baudrate 를 설정해 주어야 한다.
- roslaunch 해 준다.
roslaunch ydlidar_ros X4.launchError
- usb 포트 연결 불가
Error, cannot bind to the specified serial port [/dev/ttyUSB0] and baudrate[12800]
다른 스레드가 이미 저 포트를 사용하고 있기 때문에 발생하는 에러이다.

나의 경우에는 gps 를 사용하기 위해 /ttyUSB0 를 건드렸었는데,
$ systemctl | grep gpsd 를 해보면 gpsdctl@ttyUSB0.service 에서 포트를 사용하고 있는 것을 확인할 수 있다.
$ systemctl stop gpsdctl@ttyUSB0.service를 해서 스레드를 종료시켜주면 라이다가 제대로 작동하게 된다.
'장비 사용 설명서' 카테고리의 다른 글
| Docker를 이용해서 개발 환경 이미지로 굽기 (3) | 2024.09.09 |
|---|---|
| Nvidia Orin NX에 Jetpack 6.0 설치하기 : default ip is not available 문제 해결 (0) | 2024.07.02 |
| Linux 에서 Azuer Kinect 사용하기 (0) | 2024.02.04 |
| Realsense RGB-D 카메라 파이썬으로 사용하기 (0) | 2024.02.04 |
| Velodyne 3d lidar 세팅하기 (0) | 2024.01.01 |
Contents
소중한 공감 감사합니다