본 논문은 Iterative Extended Kalman Filter (iEKF) 프레임워크를 기반으로 한 새로운 LiDAR-Inertial Odometry인 SR-LIO를 제안한다. 회전하는 LiDAR로부터 입력되는 Raw sweep을 분할하고 Reconstruct하여 더 높은 주파수의 스윕을 얻는 스윕 Reconstruction 방법을 적용했다. 이런 방법은 각 iterated state update의 시간 간격을 효과적으로 줄일 수 있으며, 이를 통해 state estimation의 정확도를 높이고 고주파 IMU와 저주파 LiDAR를 융합하기 위한 iEKF 프레임워크의 사용을 가능하게 한다. 특정 포인트에 대한 Multiple distortion correction으로 인한 부정확한 궤적 생성을 방지하기 위해, 우리는 각 세그먼트에 대해 왜곡 보정을 수행하는 방법을 추가로 제안한다. 4개의 공개 데이터셋에 대한 실험 결과는 SR-LIO가 정확도 면에서 기존 최신 방법들을 모두 능가하며, 제안한 Sweep reconstruction을 통한 iterative state update의 시간 간격 감소가 추정된 상태의 정확도와 frequency를 향상시킬 수 있음을 보여준다.
Introduction
3차원 라이다는 넓은 범위에서 정확하고 조밀한 장면 정보를 직접 캡쳐할 수 있어서 실외 로봇과 자율 주행 분야의 주요 센서 중 하나이다. 3D LiDAR만을 활용하는 Odometry는 대부분의 시나리오에서 정확한 자세를 추정하고, 서로 다른 시간에 수집된 포인트 클라우드를 통일된 좌표계로 변환할 수 있다. 하지만 LiDAR 단독 Odometry는 여전히 두 가지 주요한 문제점이 있다.
1. 대부분의 LiDAR Odometry는 자세 추정을 위해 ICP 알고리즘에 의존하는데, 부정확한 초기 모션 값은 처리 시간을 크게 증가시킨다. 2. 기하학적 구조 정보가 부족한 장면에서는 일반적으로 사용되는 Point-to-plane ICP 알고리즘이 자세 추정을 위한 Reliable constraint의 부족으로 실패하는 경우가 많다.
IMU를 추가로 도입하는 것은 위의 두 문제를 해결할 수 있는 Promising solution이다. 기존의 LIO 시스템은 Loosely-coupled와 Tightly-coupled라는 두 그룹으로 나눌 수 있다. Loosely-coupled는 주로 IMU 측정값을 사용해 LiDAR 포인트 클라우드의 모션 왜곡을 보정하고, ICP 자세 추정을 위한 모션 Prior를 제공한다.
Tightly-coupled 프레임워크는 Loosely-coupled 프레임워크를 기반으로 하면서도 IMU 측정값을 ICP와 함께 모션 제약 조건으로 사용하여 더 정확하고 강건한 상태 추정을 달성한다. Tightly-coupled LIO 프레임워크는 주로 세 가지 유형으로 분류된다. 1. iEKF, 2. BA, 3. Graph optimization이다. 이 세 가지 유형 모두의 성능은 IMU 측정값을 적분하는 시간 간격에 달려있다.
BA와 그래프 최적화 프레임워크의 경우 긴 적분 시간은 Pre-integration의 큰 누적 오차를 초래한다. iEKF 프레임워크의 경우, 긴 적분 시간은 상태 업데이트의 주파수를 감소시킨다. 일반적으로 예측된 상태의 누적 오차가 적을 수록 더 정확하고 강건한 결과를 추정할 수 있다. 하지만 회전식 LiDAR의 연속된 두 Sweep 사이의 시간 간격은 100ms로, IMU pre-integration이나 예측된 상태에서 누적 오차가 발생하게 된다. 만약 일련의 연속된 sweep에서 일부의 key-sweep을 선택한다면 두 key-sweep 사이의 시간 간격은 더 멀어져서 누적 오차가 더욱 증가하게 된다.
본 논문에서 우리는 High-frequency sweep reconstruction을 사용하여 iEKF 기반 LIO 시스템의 IMU 측정값 적분 시간을 줄임으로써 Estimated state의 누적 오차를 감소시킬 수 있고, 결과적으로 더 정확하고 강건한 상태 추정 결과를 달성할 수 있다는 것을 발견했다. 구체적으로, sweep reconstruction 방법은 회전식 LiDAR의 연속 스캔 특성을 활용하여 원시 입력 sweep을 분할하고 reconstruct함으로써 더 높은 주파수의 sweep을 얻는다. 증가된 주파수는 연속된 두 sweep 사이의 시간 간격을 줄여, IMU 측정값 적분의 시간 간격을 감소시키고 상태 업데이트의 주파수를 증가시킨다. 따라서 sweep reconstruction은 output pose의 주파수를 높일 뿐 아니라 iEKF 기반 LIO의 상태 추정 정확도도 향상시킬 수 있다. 또한 특정 포인트에 대한 다중 불일치 왜곡 보정으로 인한 부정확한 궤적을 방지하기 위해서 우리는 각 세그먼트에 대한 왜곡 보정을 추가로 제안하며, 이는 추정된 궤적과 지도의 정확도를 보장한다. 우리는 sweep reconstruction 방법을 iEKF 기반 LIO 시스템에 통합하여 SR-LIO를 개발했다.
Related Work
LiDAR-Only Odometry
LiDAR 기반 Odometry는 라이다 포인트 클라우드에 포함된 기하학적 정보에 의존하여 추적하고, 새로운 포인트 클라우드를 지도에 지속적으로 등록한다. LOAM은 가장 고전적인 LiDAR Odometry로, 주로 세 단계로 구성된다.
1. Raw 포인트 클라우드에서 엣지와 표면 특징 추출 2. Sweep 간의 자세 추정 3. Sweep-Map 간의 자세 최적화 수행 및 최적화된 자세를 사용하여 포인트 클라우드를 지도에 등록
하지만 처리해야 할 3D 포인트 클라우드의 수가 매우 많아 LOAM의 출력 주파수는 매우 낮을 때가 많다. LOAM을 기반으로, LeGO-LOAM은 Raw 포인트 클라우드를 여러 클러스터로 그룹화하고, 기하학적 구조 정보가 부족한 클러스터를 제거하여 계산량을 줄이는 것을 제안한다. 아지만 Weak한 기하학을 가진 클러스터를 정확하게 제거하는 것은 쉽지 않은 작업아며, 유용한 클러스터를 잘못 제거하면 자세 추정의 정확도와 Robust함이 저하될 수 있다.
SuMa는 포인트 클라우드의 정보를 집계하는 Surfel 기반 표현을 통해서 지도를 표현하는 것을 제안한다. 하지만 SuMa가 실시간 성능을 달성하기 위해서는 GPU 가속이 필요하며, SuMa 자세 추정 정확도는 LOAM 프레임워크 기반 시스템보다 나아지지는 않았다.
Fast-LOAM은 스윕 간 자세 추정 모듈을 제거하고 스윕-지도 간 자세 추정 모듈만 유지한다. 또한 Fast-LOAM은 Ceres solver의 속도를 높이기 위해 자동 미분 대신 해석적 미분을 활용했다.
IMLS-LOAM은 기존의 ICP를 대체하기 위해 IMLS pose solver 알고리즘을 제안한다. 하지만 IMLS은 계산 비용이 커서 실시간으로 실행할 수 없다.
CT-ICP는 최초의 Open-source elastic LiDAR odometry 프레임워크로, 현재 sweep의 시작 상태와 끝 상태가 최적화 변수이며, 시작 상태가 이전 스윕의 끝 상태에 접근하도록 논리적 제약 조건이 추가되었다. 이런 스윕 표현을 통해 자세 추정과 왜곡 보정을 동시에 수행할 수 있다. 하지만 논리적 제약 조건의 부적절한 가중치는 추정된 궤적의 심각한 불일치를 초래할 수 있다.
LiDAR-Inertial Odometry
LiDAR-Inetrial Odometry 시스템은 크게 Loosely-coupled 프레임워크와 Tightly-coupled 프레임워크로 나뉜다. LOAM과 LeGO-LOAM과 같이 IMU 인터페이스를 가진 Loosely-coupled 프레임워크는 IMU 측정값을 사용하여 LiDAR 포인트 클라우드의 모션 왜곡을 보정하고, ICP 자세 추정을 위한 모션 prior를 제공한다.
Tightly-coupled 프레임워크는 IMU 측정값을 ICP와 함께 모션 Constraint로 사용하여 자세 추정의 정확도와 강건성을 향상시킨다. LiDAR-Odometry State estimation의 유형에 따라Tightly-coupled 시스템은 iEKF 기반, BA 기반, 그래프 최적화 기반 프레임워크로 더 나눌 수 있다.
LINs는 처음으로 6축 IMU와 3D LiDAR를 EKF 기반 프레임워크에서 융합했으며, 각 Iteration에서 새로운 Feature matching을 생성하여 추정된 상태를 recursive하게 수정할 수 있는 iEKF를 설계했다.
Fast-LIO는 고차 행렬 역행렬 계산을 피하기 위해서 칼만 게인을 해결하는 기술을 적용하여 계산 부담을 크게 줄였다. Fast-LIO를 기반으로 Fast-LIO2는 ikd-tree 알고리즘을 제안했다. 기존 kd-tree와 비교하여, ikd-tree는 트리 구축, 트리 순회, 요소 제거 및 기타 작업에서 시간 비용을 줄인다.
Preliminary
A. Coordinate Systems
본 논문에서는 3D 포인트를 World 좌표계, LiDAR 좌표계, IMU 좌표계에서 각각 (·)w, (·)l, (·)b로 표기한다. 시간 ti에서 i번째 스윕을 취하는 LiDAR 좌표계를 li로, 그에 대응하는 ti에서의 IMU 좌표계를 bi로 표기하며, li에서 bi로의 변환 행렬(즉, 외부 파라미터)을 Tbi ∈ SE(3)로 표기하며, 이는 R3로 구성된다. 외부 파라미터는 보통 오프라인에서 한 번 보정되어 온라인 자세 추정 동안 일정하게 유지된다.
자세 외에도 속도 v, 가속도계 바이어스 ba, 자이로스코프 바이어스 bω, 중력 가속도 gw를 추정하며, 이들은 State vector로 통일하여 표현한다. B. IMU Measurement 모델
IMU 좌표계에서 측정되는 IMU 측정값들은 중력을 상쇄하는 힘과 플랫폼 동역학을 결합하며, 가속도 바이어스 bat, 자이로스코프 바이어스 bωt, 그리고 가산 노이즈의 영향을 받는다. VINs-Mono에서 언급된 바와 같이, 가속도와 자이로스코프 측정값의 가산 노이즈는 가우시안 백색 노이즈로 모델링될 수 있다.
SR-LIO
A. Overview
Fig. 2는 클라우드 처리, Static initialization, iEKF 기반 상태 추정, 지도 업데이트의 네 가지 주요 모듈로 구성된 SR-LIO의 프레임워크를 보여준다. 클라우드 처리 모듈은 10Hz의 입력 스윕을 다운샘플링한 뒤, 다운샘플링된 10Hz 스윕을 분할하고 재구성하여 20Hz의 재구성된 스윕을 얻는다. Static initialization 모듈은 IMU 측정값을 활용하여 중력 가속도, 가속도계 바이어스, 자이로스코프 바이어스, 초기 속도와 같은 상태 파라미터들을 추정한다. iEKF 기반 상태 추정 모듈은 실시간으로 상태 추정을 수행하며, 상태 업데이트의 주파수는 재구성된 스윕의 주파수와 동일하게 유지한다. 마지막으로, 포인트 클라우드를 지도에 추가하고 먼 거리의 포인트 클라우드를 삭제한다. 지도 관리를 위해 CT-ICP와 동일한 Hash Voxel Map*을 사용했다.
B. Cloud Processing
1) Downsampling
전체 시스템의 계산 부담을 줄이기 위해 입력 포인트 클라우드를 다운샘플링한다. 먼저 네 개의 포인트 중 하나만 유지하는 정량적 다운샘플링 전략을 수행한다. 그런 다음, CT-ICP와 동일하게 정량적으로 다운샘플링된 포인트들을 0.5 x 0.5 x 0.5 (단위: m) 복셀 크기의 볼륨에 넣고, 각 복셀이 하나의 포인트 클라우드만 포함하도록 한다.
2) Sweep Reconstruction
Sweep reconstruction은 10Hz 원본 포인트 클라우드 S로부터 20Hz Reconstrurted sweep P를 유도하는 것을 목표로 한다. Fig. 1은 우리의 이전 연구에서 제안된 스윕 재구성의 핵심 아이디어를 보여준다. t(j-1)에서 시작하여 tj에서 끝나는 마지막 스윕 Sj와 tj에서 시작하여 t(j+1)에서 끝나는 현재 입력 스윕 S(j+1)이 주어졌을 때, 우리는 시간 간격 [tj-1, tj]와 [tj, tj+1]의 길이가 모두 100ms라고 가정한다.
본 논문에서는 초기 속도, 중력 가속도, 가속도계 바이어스, 자이로스코프 바이어스를 포함한 필수 변수들을 추정하기 위해 시스템에서 Static Initializa를 채택했다. 자세한 내용은 [9] 참조 (P. Geneva, K. Eckenhoff, W. Lee, Y. Yang, and G. Huang, “Openvins: A research platform for visual-inertial estimation,” in 2020 IEEE Inter- national Conference on Robotics and Automation (ICRA). IEEE, 2020, pp. 4666–4672.)
D. iEKF based State Estimation
Fast-LIO와 동일하게, 상태 추정을 수행하기 위해 반복 확장 칼만 필터(iEKF)를 사용했다. 예측과 업데이트 공식을 유도하기 위해 필터의 상태 변수로 오차 상태를 설정했다.
δx = [δt, δθ, δv, δba, δbω, δg]T
δθ ∈ so(3), δt, δv, δba, δbω ∈ R3,δg ∈ S2 이다. 추정된 오차 상태는 각 상태 업데이트 반복 동안 Optimal State에 더해진다.
1) State Estimation
상태 예측은 IMU 입력(즉, ωˆn+1과 aˆn+1)을 받을 때마다 수행되며, 최적 상태는 다음과 같이 계산된다.
1. 각 Reconstructed 스윕에 대해 왜곡 보정 수행 2. 각 세그먼트에 대해 왜곡 보정 수행
방법 1은 특정 기간의 포인트 클라우드가 여러 번 왜곡 보정 되는 문제가 있다. 각 왜곡 보정에 사용되는 자세가 다르기 때문에, 특정 포인트에 대해 두 번의 보정 후에 World 좌표계에서의 좌표가 동일하지 않게 된다. 이 문제는 추정된 궤적의 부정확성을 초래할 수 있다.
이 문제를 해결하기 위해, 우리는 전체 스윕이 아닌 각 세그먼트에 대해 왜곡 보정을 수행하는 것을 제안한다. (Fig 3 참조)
1. 각 세그먼트(예: Cj+1²)에 대해: 해당 세그먼트의 포인트(예: p ∈ Cj+1²)를 IMU 적분된 자세나 균일 운동 모델에 따라 세계 좌표계(·)w로 변환 2. 재구성된 스윕 Pi+1을 얻은 후: 해당 스윕에 속한 모든 포인트를 세계 좌표계(·)w에서 LiDAR 좌표계(·)li+1로 변환하여 왜곡 보정을 완료
*세그먼트 : sweep reconstruction 과정에서 생기는 LiDAR 데이터의 부분 집합을 의미한다.
Original Sweep Sj+1:
|-----------------|
tj tj+1
이것을 두 세그먼트로 나눔:
|--------|--------|
Cj+1¹ Cj+1²
tj tαj+1 tj+1
하나의 Original Sweep(Sj+1)은 두 개의 세그먼트로 나뉨
첫 번째 세그먼트(Cj+1¹): [tj, tαj+1] 구간의 포인트 데이터
두 번째 세그먼트(Cj+1²): [tαj+1, tj+1] 구간의 포인트 데이터
이 세그먼트들은 재구성 과정에서 다음과 같이 사용됨:
Pi는 Cj¹과 Cj+1¹을 사용
Pi+1은 Cj+1¹과 Cj+1²을 사용
따라서 여기서는 각 세그먼트에 대해서 한 번씩만 왜곡 보정을 수행하여 동일한 포인트에 대한 다중 왜곡 보정을 피하고 있다.
3. State Update
Step 1. Point-to-plane* residuals computation
각 iteration에서 먼저 point-to-plane residual을 구한다. 왜곡이 보정된 포인트 pk에 대해서 먼저 pk를 world 좌표계로 투영하여 pkw를 얻고, 그 다음 볼륨에서 pkw 주변의 가장 가까운 20개의 포인트를 찾는다. pkw의 최근접 이웃을 검색하기 위해, 우리는 pkw가 속한 복셀 V와 V에 인접한 8개의 복셀에서만 검색한다. 이 20개의 최근접 포인트들은 법선 n과 거리 d를 가진 평면을 맞추는 데 사용된다. 이에 따라, 우리는 pk에 대한 점-평면 잔차 rpk를 observation constraint로 구축할 수 있다.
*Point-to-point가 아니라 Point-to-plane ICP를 수행하는 이유 :
평면적 특성이 많은 실내/도시 환경에서 특히 효과적이고, Point-to-point ICP보다 정확도가 높고 수렴 속도가 빠르다. 여기서는 다음과 같이 동작한다.
현재 포인트(pk)
↓
세계 좌표계로 변환(pkw)
↓
주변 20개 포인트 찾기
↓
평면 피팅(법선 n, 거리 d)
↓
점-평면 거리 계산(residual)
Step 2. Incremental Computation
1. 상태 정의: - xwbi+1 0: 상태 예측에서 계산된 최적 상태 - xwbi+1 n: 현재 반복 전의 최적 상태 ... 4. 수렴 조건 - 최대 반복 횟수(6회) 도달 - 증분의 크기가 임계값 이하 (회전: 0.1도, 이동: 0.01m)
E. Map Update
CT-ICP처럼 클라우드 맵은 볼륨에 저장된다. 각 복셀의 크기는 1.0 × 1.0 × 1.0(단위: m)이며 각 복셀은 최대 20개의 포인트를 포함한다. 현재 다운샘플링된 스윕 Pi+1의 상태가 추정되면, Pi+1을 세계 좌표계 (·)w로 변환하고 변환된 포인트들을 볼륨 맵에 추가한다. 복셀이 이미 20개의 포인트를 가지고 있다면, 새로운 포인트들은 추가될 수 없다. 한편, 현재 위치에서 멀리 떨어진 포인트들은 삭제한다.
Experiments
우리는 SR-LIO를 nclt, utbm, ulhk, kaist 네 개의 공개 데이터셋에서 평가했다. n
clt는 미시간 대학교 북캠퍼스에서 수집된 대규모, 장기 자율 무인 지상 차량 데이터셋이다. nclt 데이터셋은 Velodyne HDL-32E LiDAR의 전체 데이터 스트림과 Microstrain MS25 IMU의 50Hz 데이터를 포함한다. 다른 세 데이터셋(utbm, ulhk, kaist)과 달리, nclt의 LiDAR는 360도 스윕을 완료하는 데 130~140ms가 걸린다(즉, 스윕의 주파수는 약 7.5Hz). 또한, nclt의 일부 시퀀스 끝에서는 Segway 차량 플랫폼이 실외에서 문을 통해 긴 실내 복도로 들어가면서 큰 장면 변화가 발생한다. 이러한 큰 장면 차이는 ICL 포인트 클라우드 등록에 큰 어려움을 초래하며, 따라서 거의 모든 시스템이 여기서 실패하는 경우가 많다. 따라서 우리는 일반적으로 시퀀스 끝에 위치한 이러한 경우들에 대한 테스트는 생략했다. 또한, 50Hz IMU 측정값은 일부 시스템(예: LIO-SAM)의 요구사항을 충족시키지 못 했다. 따라서 우리는 보간을 통해 IMU의 주파수를 100Hz로 증가시켰다.
utbm 데이터셋은 두 개의 10Hz Velodyne HDL-32E와 100Hz Xsens MTi-28A53G25 IMU를 사용했다. 포인트 클라우드의 경우, 우리는 왼쪽 LiDAR의 데이터만 사용했다. ulhk 데이터셋은 Velodyne HDL-32E LiDAR의 10Hz LiDAR 스윕과 9축 Xsens MTi-10 IMU의 100Hz IMU 데이터를 포함한다. kaist는 두 개의 10Hz Velodyne VLP-16, 200Hz Xsens MTi-300 IMU를 포함한다. 두 3D LiDAR는 약 45° 기울어져 있다.
포인트 클라우드의 경우, 우리는 두 3D LiDAR의 데이터를 모두 사용한다. utbm, ulhk, kaist의 모든 시퀀스는 사람이 운전하는 차량으로 구조화된 도시 지역에서 수집되었다. 센서 유형과 데이터 속도를 포함한 데이터셋 정보는 Table I에 나와 있다.
네 데이터셋 모두에 대해, 우리는 보편적인 평가 지표인 절대 이동 오차(ATE)를 평가 지표로 사용했다. 모든 실험에는 Intel Core i7-12700과 32GB RAM이 장착된 컴퓨터가 사용되었다.
A. Comparison of the State-of-the-Arts
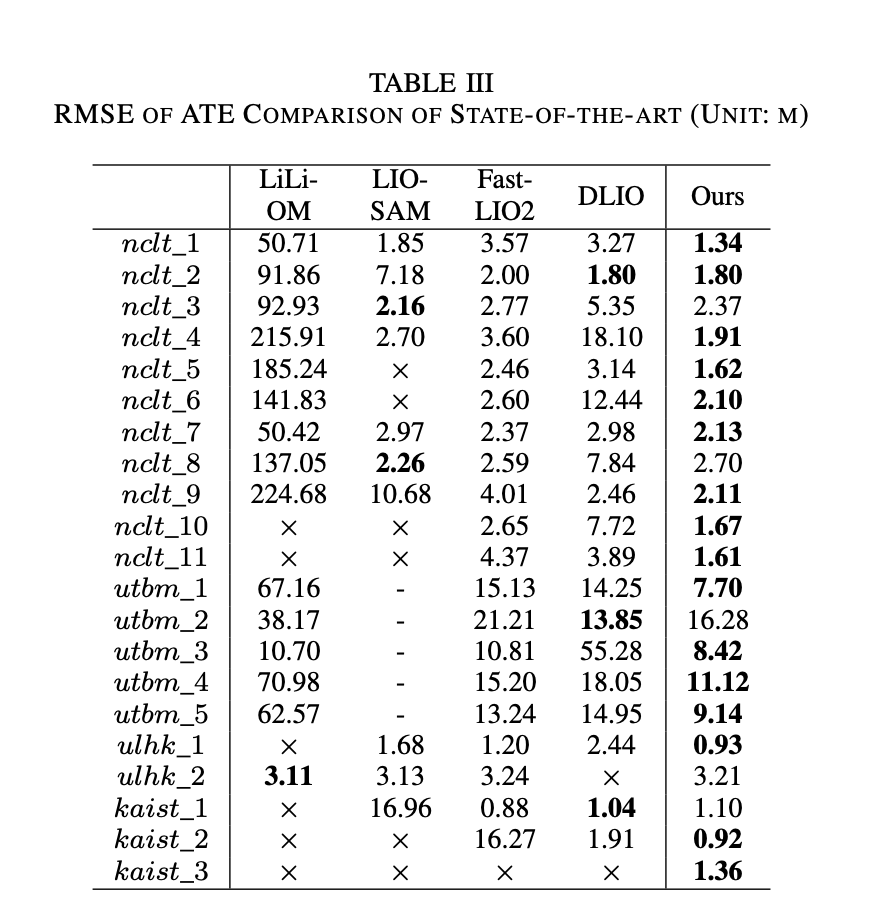
SR-LIO를 LiLi-OM, LIO-SAM, Fast-LIO2, DLIO와 비교했다.
- LiLi-OM : Raw 입력 스윕에서 Key 스윕을 선택하고, LiDAR Point-to-plane residual과 IMU Pre-integration residual을 BA 최적화 기반 프레임워크에 결합 - LIO-SAM : IMU 팩터와 LiDAR Point-to-plane 팩터를 그래프 최적화 기반 프레임워크에 결합 - Fast-LIO2, DLIO : iEKF 기반 LIO, (Fast-LIO2 : ikdtree, DLIO : nanoflan)
Table III의 결과는 우리의 SR-LIO가 더 작은 ATE 측면에서 거의 모든 시퀀스에서 최신 기술들을 능가함을 보여준다. nclt 3, ulhk 2, kaist 1에서 우리의 정확도가 최고는 아니지만, 최고 정확도에 매우 근접하다.
LIO-SAM은 입력으로 9축 IMU 데이터가 필요하지만, utbm 데이터셋은 6축 IMU 데이터만 제공한다. 따라서 utbm 데이터셋에서 LIO-SAM의 결과를 제공할 수 없었다.
Table IV의 결과는 우리의 스윕 재구성 방법이 기존 최신 기술들보다 더 높은 주파수의 스윕을 제공할 수 있음을 보여준다. LiDAR 스캔의 주파수(예: 10Hz)에 의해 제한되어, 반복 상태 업데이트는 최대 10Hz의 주파수로만 수행될 수 있다.
B. Ablation Study of Sweep Reconstruction
우리는 스윕 재구성을 사용한 경우와 사용하지 않은 경우의 ATE 결과를 비교하여 자세 추정 정확도에 대한 스윕 재구성의 영향을 검토했다. Table V의 결과는 스윕 주파수를 증가시켜 상태 업데이트의 주파수를 증가시키면 iEKF 프레임워크의 정확도와 강건성을 향상시킬 수 있음을 보여준다.
C. Ablation Study of Distortion Correction
각 세그먼트에 대한 제안된 왜곡 보정은 특정 포인트에 대한 다중 불일치 왜곡 보정으로 인한 부정확한 궤적을 방지할 수 있다. Fig. 4에서 보여지듯이, (a)는 각 세그먼트에 대한 왜곡 보정이 적용된 예시 시퀀스 utbm 1의 부분 궤적이고, (b)는 재구성된 스윕에 대해 직접 왜곡 보정이 적용된 예시 시퀀스 utbm 1의 부분 궤적이다. 비교 결과는 각 세그먼트에 대한 제안된 왜곡 보정이 LiDAR 포인트들을 더 잘 왜곡 보정할 수 있고, 결과적으로 정확한 궤적을 얻을 수 있음을 보여준다.
D. Time Consumption
우리는 모든 시퀀스에 대한 우리 시스템의 런타임 분석(단위: ms)을 평가했다. 일반적으로, 가장 시간이 많이 소요되는 모듈은 (1) 스윕 분할, (2) 각 세그먼트에 대한 왜곡 보정이 포함된 스윕 재구성, (3) iEKF 기반 상태 추정, (4) 지도 업데이트이다. 따라서 각 시퀀스에 대해, 우리는 위 네 모듈의 시간 비용과 스윕 처리에 필요한 총 시간을 테스트했다. Table VI의 결과는 우리의 SR-LIO가 스윕 처리에 20~30ms가 소요되는 반면, 두 연속된 재구성된 스윕 사이의 시간 간격은 nclt 데이터셋에서 65ms, utbm, ulhk, kaist 데이터셋에서 50ms임을 보여줍니다. 이는 우리 시스템이 실시간으로 실행될 수 있을 뿐만 아니라, 재구성된 스윕당 20 45ms를 절약할 수 있음을 의미한다.*
*시스템이 한 스윕을 처리하고 다음 스윕이 들어올 때까지 20~45ms의 여유 시간이 있다는 의미.
시스템의 처리 시간:
SR-LIO가 한 스윕을 처리하는데 20~30ms 소요
스윕 간 시간 간격:
nclt 데이터셋: 65ms
utbm, ulhk, kaist 데이터셋: 50ms
여유 시간 계산:
nclt의 경우: 65ms - 30ms = 35ms 여유
다른 데이터셋: 50ms - 30ms = 20ms 여유
Conclusion
본 논문은 이전에 제안된 스윕 Reconstruction 방법을 활용해 스윕 주파수를 증가시키고, 더 높은 주파수의 재구성된 스윕을 사용하여 iEKF 기반 LIO 프레임워크(즉, SR-LIO)에 대한 상태 업데이트를 수행한다. LIO 시스템의 경우, 이 방법은 LiDAR 스윕의 주파수를 증가시킬 뿐만 아니라 IMU 측정값 적분의 시간 간격을 줄임으로써 예측된 상태의 누적 오차를 줄일 수 있으며, 결과적으로 더 정확하고 강건한 상태 추정 결과를 달성할 수 있다. 또한, 공통 데이터를 가진 재구성된 스윕의 경우, 추정된 궤적의 정확도를 더 잘 보장하기 위해 전체 재구성된 스윕이 아닌 각 세그먼트에 대해 왜곡 보정을 수행할 것을 제안한다.
제안된 SR-LIO는 네 개의 공개 데이터셋에서 최고 수준의 정확도를 달성했다. 또한, 우리는 iEKF 기반 LIO 시스템의 출력 주파수와 정확도를 향상시키는 스윕 재구성의 효과를 입증했다.